Erhalten Sie Zugang zu diesem und mehr als 300000 Büchern ab EUR 5,99 monatlich.
- Herausgeber: Books on Demand
- Kategorie: Fachliteratur
- Serie: Der Weg zum eigenen Roboter
- Sprache: Deutsch
Sie haben den Roboter aus Band I nachgebaut und möchten diesen jetzt erweitern? In Band 2 werden viele neue Möglichkeiten erklärt, wie Sie den Roboter mit analogen und digitalen Sensoren erweitern. Die dazugehörige Programmierung in C wird detailliert erklärt und zwar so, das auch der ungeübte Programmierer mit geringen Vorkenntnissen den Programmiercode versteht. Aus dem Inhalt: Rückblick auf Band I, was wurde erreicht? Auswerten von Sensorsignalen (Polling, ISR) Der Analog-Digital-Wandler Timerprogrammierung, Teil II (der WatchDog) Zusätzliche Sensoren für den Roboter Steuern und Regeln mit dem Mikrocontroller (P-Regler) Eine neue Steuerplatine auf Basis des ATmega32 Datenübertragung von PC zu Roboter (RS232, I²C-Bus) Drahtlose Kommunikation via Bluetooth Projekte: Spannungsüberwachung des Akkus mit AD-Wandler Liniensensor, folgen einer Linie auf dem Boden Drehimpulsgeber, realisiert mit Gabellichtschranke Gleichlauf der Räder (geradeaus fahren mittels P-Regler) Roboter Steuerprogrammerweiterung um die Funktion AVIOD Autonome Wegsuche durch ein Labyrinth Ansteuern von Servos aus dem RC-Modellbau Auslesen der Befehle von einem RC-Empfänger Ansteuern eines bipolaren Schrittmotors
Sie lesen das E-Book in den Legimi-Apps auf:
Seitenzahl: 146
Veröffentlichungsjahr: 2017
Das E-Book (TTS) können Sie hören im Abo „Legimi Premium” in Legimi-Apps auf:
Ähnliche




Verlag: BoD – Books on Demand, Norderstedt.
ISBN:9783744873642
Mein persönlicher Dank gilt folgenden Personen, die unermüdlich an der Fertigstellung dieses Buches mitgearbeitet haben und die manchmal doch recht eigenwilligen Ideen des Autors in Bild und Fotografie umsetzten.
Nicht zu vergessen, das technische Korrekturlesen der Schaltungen und der Begleittexte, welches sich als eine der aufwendigsten Arbeiten herausstellte.
Klaus Wellmann (Korrekturlesen)
Jürgen Rösler (Korrekturlesen)
Gerhard Spode (Korrekturlesen)
Christina Pagels (Beratung und Fotografien)
Gerd Lehmann (Comic Zeichnungen)
Inhaltsverzeichnis
Vorwort
Voraussetzungen zum Arbeiten mit diesem Buch
Rückblick auf die Arbeitsergebnisse des ersten Bandes
1.1 Informationen zur verwendeten Roboterhardware
1.1.1 Chassis Roboter R2PT3
1.1.2 Steuerplatine des Roboters
1.1.3 Die Test- und Programmierplatine
Auswerten von Sensorsignalen
2.1 Flussdiagramme, auch Prograrnmablaufpläne genannt
2.2 Signalauswertung über Polling
2.3 Signalauswertung über Interrupt
Der Analog-Digital-Wandler
3.1 Allgemeine Grundlagen
3.2 Programmablaufplan
3.3 Programmcode AD-Wandler-Funktion
Projekt: Spannungsüberwachung des Akkus mit AD-Wandler
4.1 Entwurf einer Spannungsüberwachung
4.2 Ablaufplan Funktion check_bat()
4.3 Programmcode Funktion check bat ()
4.4 Einbinden der Funktion in das Hauptprogramm
4.5 Programmablaufplan Hauptprogramm
4.6 Sourcecode Hauptprogramm
Timerprogrammierung (ATmega8)
5.1 Allgemeines zum 8-Bit-Timer
5.2 Der WatchDog(Stopuhr des ATmega8)
5.3 Programmablaufplan WatchDog ISR
5.4 Sourcecode der ISR
5.5 Programmablaufplan Init-Timer-Register
5.6 Sourcecode Init-Timer-Register
5.7 Ein einfaches Anwendungsbeispiel
Zusätzliche Sensoren für den R2PT3 Roboter
6.1 Allgemeine Übersicht über die Sensoren des R2PT3
6.2 Passive- und aktive Sensoren
6.3 Analoge und digitale Infrarot Sensoren
6.3.1 Infrarot Reflexkoppler CNY70
6.3.2 Infrarot Reflexkoppler GP2Y0A21YK0F von Sharp.
6.3.3 IR-Gabellichtschranke GP1S58VJ000F von Sharp
6.3.4 Infrarot Reflexkoppler IS471F
6.4 IR-Sensor auf Basis des IS471F
Projekt: Liniensensor
7.1 Entwurf eines Liniensensors
7.1.1 Der IR Sensor CNY70
7.1.2 Die IR-Sensor Platine
7.1.3 Realisierung des Sensors
7.2 Software zur Auswertung der Sensorsignale
7.2.1 Funktion: check_line
7.2.2 Funktion: move_control
Projekt: Impulsgeber
8.1 Entwurf einer Impulsgeberschaltung
8.2 Software zur Auswertung der Signale des Impulsgeber
8.2.1 Abfrage der Impulsgeber
8.2.2 Funktion speed_fwd_full
8.3 Anwendungsbeispiel, eine bestimmte Strecke fahren
8.3.1 Funktion behaviourController
8.3.2 Funktion behaviour_cruise
8.3.3 Funktion behaviour_escape
8.3.4 Funktion moveCommand
8.3.5 Funktion Motor_Control
Steuern und Regeln mit dem Mikrocontroller
9.1 Ein wenig Theorie zum Thema Steuern und Regeln
9.1.1 Unterschied zwischen Steuern und Regeln
9.1.2 Der Regelkreis
9.1.3 Verschiedene Typen von Reglern
9.1.4 Realisierung eines Reglers mittels Software
Projekt: Gleichlauf der Antriebsräder des Roboters
10.1 Allgemeine Beschreibung des Projekt-vorhabens
10.2 Komponenten des Regelkreises
10.3 Software zur Auswertung der Sensorsignale
10.4 Realisierung der Regelung mittels P-Regler
Programmerweiterung um den Status AVOID
11.1 Allgemeine Beschreibung der Funktion AVOID
11.2 Verdrahtung der IR-Sensoren
11.3 Veränderungen zum bestehenden Sourcecode aus dem Kapitel 8.3
11.3.1 Hauptprogramm main anpassen
11.3.2 ISR anpassen
11.3.3 Funktion behaviourController anpassen
11.4 Sourcecode der neuen Funktionen
11.4.1 Neue Funktion speed_left_avoid oder speed_right_avoid
11.4.2 Neue Funktion check_for_hindernis
11.4.3 Funktion moveCommand anpassen
11.4.4 Neue Funktion behaviour_avoid
Steuerplatine auf Basis des ATmega32
12.1 Steuerplatine
12.2 Schaltplan, Bohr- und Bestückungsplan
12.2.1 Schaltplan Steuerplatine ATmega32
12.2.2 Bohrplan Steuerplatine ATmega32
12.2.3 Bestückungsplan Steuerplatine ATmega32
12.3 Änderungen an der Software
12.3.1 Der 16-Bit Timer
12.3.2 Anpassung der ISR
12.3.3 Funktion Motor_Drehrichtung
12.3.4 Funktion Motor_Geschwindigkeit
12.3.5 Funktion Motor_Control
12.3.6 Funktion check_for_hindernis
Datenübertragung von PC zum Mikrocontroller
13.1 Warum überhaupt Datenübertragung?
13.2 UART- oder RS232-Schnittstelle
13.3 Der I
2
C-Bus
13.4 Datentransfer mittels Bluetooth
13.4.1 Schaltplan der Testschaltung
13.4.2 Bohrplan
13.4.3 Bestückungsplan
13.4.4 Programmierung des Moduls
Projekt: Datenübertragung von PC zu R2PT3
14.1 Allgemeine Beschreibung des Projektes
14.2 Adapterplatine für den R2PT3
14.3 Programmcode für den PC
14.3.1 Daten über Tastatur einlesen
14.3.2 Daten an die serielle Schnittstelle senden
14.4 Programmcode für den R2PT3
14.5 Aufbau einer Handsteuerung
14.5.1 Aufbau der Senderhardware
14.5.2 Sourcecode für den Handsender
Projekt: Wegsuche durch ein Labyrinth
15.1 Allgemeine Beschreibung des Projektes
15.2 Installation der neuen Sensoren
15.3 Programmcode für den R2PT3
Projekt: Ansteuern von Servos aus dem RC-Modellbau
16.1 Allgemeine Beschreibung des Projektes
16.2 Programmcode für den PC
16.3 Programmcode für den ATmega8 Mikrocontroller
Projekt: Auswerten der Signale aus einem RC-Modellbauempfänger
17.1 Allgemeine Beschreibung des Projektes
17.2 Programmcode für den ATmega8 Mikrocontroller
Projekt: Ansteuern eines Schritt-motors
18.1 Allgemeine Beschreibung des Projektes
18.2 Programmcode für den ATmega8 Mikrocontroller
Schlussbetrachtung und Ausblick
Sourcecode-Sammlung
20.1 Projekt Spannungsüberwachung des Akkus mit AD-Wandler
20.1.1 Header-Datei für AD-Wandlerauswertung
20.1.2 Spannungsüberwachung des Akkus
20.2 Timerprogrammierung (ATmega8)
20.3 Projekt: Liniensensor
20.4 Projekt: Impulsgeber
20.5 Projekt: Gleichlauf der Antriebsräder des Roboters
20.6 Programmerweiterung um den Status AVOID
20.7 Projekt: Datenübertragung von PC zu R2PT3 mittels Bluetooth
20.7.1 Sourcecode für den Header-File RS232_v1.h
20.7.2 Sourcecode für R2PT3
20.7.3 Sourcecode für PC
20.7.4 Sourcecode für Handsender
20.8 Projekt: Wegsuche durch ein Labyrinth
20.9 Projekt: Ansteuern von Servos aus dem RC-Modellbau
20.9.1 Sourcecode für die ATmega8 Test -und Programmierplatine
20.9.2 Sourcecode für die PC Software
20.10 Projekt: Auswerten der Signale aus einem RC-Modellbauempfänger
20.11 Projekt: Ansteuern eines Schrittmotors
Fehleranalyse
Quellenangaben:
22.1 Internet-Quellen:
22.2 Bücher:
Bezugsmöglichkeiten der verwendeten Bauteile und Materialien
Materiallisten für den Roboterbau inkl. Steuerplatine
24.1 Roboter und Chassis
24.2 Steuerplatinen
24.3 Sensoren
24.4 Test –und Programmierplatinen
24.5 Bluetooth
Vorwort
Liebe Roboterbegeisterte und Technikfreaks. In meinem zweiten Band über Robotertechnik möchte ich mit Ihnen einige Ausflüge in Richtung der Sensorik unternehmen und wie man diese Sensorwerte geschickt auswertet bzw. verarbeitet. Als erstes betrachten wir einmal unser Ergebnis aus Band I, „Der Weg zum eigenen Roboter, Selbstbau und Programmierung“. Wie, noch nicht gekauft und dann wollen Sie hier in die Thematik einsteigen…?
Okay, vielleicht haben Sie ja auch das fertige Produkt bei Schneider-Engineerings (www.ps-robotics.de) bezogen, oder Sie haben bereits Erfahrungen gesammelt auf dem Gebiet der Robotertechnik und wollen Ihr Wissen vertiefen. Alles valide Begründungen und doch möchte ich Sie darauf aufmerksam machen, dass wir auf bestehende Hardware und Software aus Band I immer wieder zurückgreifen werden. Ebenfalls möchte ich nicht verschweigen, dass dieses Buch nicht für Anfänger geschrieben ist. Viele der gezeigten Beispiele sind so groß im Umfang, dass ich nicht jede Zeile Sourcecode beschreiben kann.
Natürlich gibt es direkt am Anfang dieses Buches einen Crashkurs zu den Ergebnissen aus Band I. Die dort gezeigten Bilder und Erklärungen sollten Ihnen den schnellen Einstieg ermöglichen. Der PC diente bisher nur als Entwicklungstool und Datentransferschnittstelle. Diesmal wollen wir ein wenig tiefer in die Möglichkeiten eintauchen den PC für Simulationen und als Kommunikationsschnittstelle zu nutzen. Kommunikationsschnittstelle, hört sich fast gefährlich an! Was gemeint ist, ist dass wir den PC nutzen wollen, via Funksignal z.B. Wireless Network (WLAN) oder Bluetooth mit dem Roboter in Verbindung zu treten.
Um das Ganze nicht von vorneherein zu verkomplizieren, schauen wir uns die Grundlagen der Kommunikation mit einem Roboter an einer seriellen Schnittstelle an. Bei dieser Datenübertragung wird die RS232 Schnittstelle des PCs und die RS232 Schnittstelle des Mikrocontrollers (UART) zur Datenübertragung genutzt. Die dort gewonnenen Grundlagen werden wir ausbauen und bei den Funkverbindungen verwenden bzw. weiterentwickeln. Wozu das alles? Über die Funk– bzw. Netzwerkverbindung sollen Daten ausgetauscht werden. Zum Beispiel können wir Steuerdaten von dem PC an den Roboter senden und den Roboter somit fernsteuern. Bisher war der Roboter nur in der Lage geradeaus zufahren und beim Berühren von Hindernissen die Fahrtrichtung zu ändern. Als weiteren Punkt werden wir die Analog-Digital-Schnittstelle am ATmega8 Mikrocontroller ansteuern und auslesen. Nutzen werden wir die AD-Schnittstelle, um eine Batterieüberwachung für den Roboter zu realisieren. Außerdem werden wir das bestehende Programm zur Robotersteuerung aus Band I erweitern, um die Funktion AVOID. Mit dieser neuen Funktion und entsprechend neuen Sensoren, soll der Roboter entfernte Hindernisse erkennen und ihnen ausweichen. Eine weitere Sensor– und Programmerweiterung soll den Roboter in die Lage versetzen einer Linie am Boden zu folgen. Zusätzlich angebrachte Lochscheiben an den Getriebeachsen werden als Impulsgeber genutzt. Über einen Regelalgorithmus wollen wir den Gleichlauf der Antriebsräder realisieren. Somit kann der Roboter sehr genau geradeaus fahren. Da wir an die Speichergrenzen des ATmega8 kommen, werden wir eine neue Robotersteuerplatine, auf Basis des ATmega32 erstellen und die bisher genutzte Steuerplatine, auf Basis des ATmega8 ablösen.
Neue Sensoren wollen wir ebenfalls entwickeln, auf Basis von Infrarot Sendern und Empfängern und noch viele kleine weitere Dinge, die unserem Roboter mehr „Leben“ einhauchen. Bei all den kleinen Projekten wird es jede Menge Tipps und Tricks geben, die uns das Leben erleichtern.
Hört sich toll an? Dann aber los und ein neues Kapitel der Robotik angehen. Genau wie letztes Mal, alles im Eigenbau oder Neu-Deutsch „home made“!
Ebenfalls für den Band II gilt, dass ich gerne mal abschweife und versuche meine Erfahrungen mit etwas Humor einfließen zu lassen. Ich möchte das manchmal sehr trockene Thema etwas mit Esprit würzen und eines werde ich Ihnen bestimmt nicht verheimlichen, meine Misserfolge und den Frust, den ich geschoben habe wenn es nicht funktionierte. Mit diesem Buch möchte ich Ihnen zeigen, wie man die größten Fehler vermeiden, bzw. wie man aus dem Dilemma herauskommt, wenn gar nichts mehr geht.
Anmerkung:
Je nach dem, wann Sie dieses Buch erwerben kann es sein, dass die Produkte / Elektronikbauteile in den beschriebene Versionen nicht mehr verfügbar sind. Meistens hat man aber Glück und findet die Nachfolgemodelle, die dann meistens abwärtskompatibel sind. Das gilt sowohl für die verwendete Software, als auch für die verwendete Hardware.
Genannte Informationen über Bauteile sind auf das Entstehungsjahr (2016 / 2017) dieses Buches bezogen.
Voraussetzungen zum Arbeiten mit diesem Buch
Für wen ist dieses Buch geschrieben? Einen Teil der Antwort habe ich schon im Vorwort beschrieben. Hier nun einige Vorbedingungen, die wir ganz am Anfang klären sollten:
Sie sind wenigstens etwas technisch versiert. Wir werden das Problem haben, dass Sie mit einer z.B. Laubsäge, Teppichmesser o.ä., Schraubendreher, oder einem Lötkolben umgehen können sollten.
Letzteres, der Lötkolben wird uns ständig beim Bestücken der Platine begleiten, ob ein Kabel angelötet werden muss, oder Bauteile auf der Steuerplatine angelötet werden müssen. Der Lötkolben ist unser wichtigstes Hilfsmittel. Übrigens, die aufsteigenden Dämpfe beim Löten sind nicht gerade gesundheitsförderlich! Für eine ausreichende Belüftung ist zu sorgen.
Sie sollten in der Lage sein, einen Schaltplan zumindest rudimentär zu verstehen. Zum Beispiel, wenn da steht [+5Volt] heißt das nicht, Wechselstrom anlegen, wie das meine ersten Kunden versuchten und sich dann über den leicht süßlichen riechenden, weißen Rauch wunderten, der von der Steuerplatine emporstieg.
Als nächstes sei erwähnt, dass ich davon ausgehe, dass Sie einzelne Bauteile für die Steuerplatine erkennen können. Wir werden es mit ICs, Widerständen und Spannungsreglern zu tun bekommen, um nur einige Bauteile zu erwähnen. Viele dieser Bauteile reagieren mit ihrem „Ableben“ auf zu viel Wärme vom Lötkolben, oder statische Aufladung, die wir mit uns herum tragen. Also bitte, fassen Sie Beinchen der Bauteile nur an, wenn Sie ein Antistatik-Band tragen. Auch verpolen endet meistens mit der Zerstörung des Bauteils.
Den Punkt Programmierung, bei mir hier in C++, möchte ich noch erwähnen. Es handelt sich allerdings um sehr einfache C-Programmierung, ohne komplexe Funktionen, oder objektorientierter Programmierung. Für unsere Zwecke reicht simples ANSI C völlig aus.
Toll wäre es, wenn Sie auch die entsprechenden datasheets der verwendeten Bauteile lesen würden. Nicht nur die Pinbelegung des entsprechenden Bauteils finden Sie hier, sondern auch wichtige Hinweise, wie z.B. bei dem verwendeten Mikrocontroller, die Bedeutung der einzelnen Register, die wir hier im Laufe ansprechen werden. Unter der Webseite
www.alldatsheet.com
finden Sie die datasheets der verwendeten Bauteile.
Zeichenerklärungen: Ein „ * “ steht für einen Platzhalter, Wichtige Informationen in Bildern und Zeichnungen sind umrandet.
Das hört sich jetzt alles ziemlich verwirrend an, ist es aber nicht. Ich möchte nur verhindern, dass Sie zwar mit viel Enthusiasmus an die Sache ran gehen, aber dann enttäuscht sind, wenn es mal nicht direkt klappt. Die einzelnen Schritte wurden mit Zeichnungen und Fotografien hinterlegt, das sollte Ihnen helfen und ein Bild sagt nun mal mehr als tausend Worte.
Also, wenn Sie in der Bücherei nun die ersten Seiten gelesen haben und Ihnen das Buch nicht gefällt, dann haben Sie jetzt noch die Chance es wegzustellen. Vorsicht, sollten Sie mit dem Robotervirus infiziert werden, dann ist das in den meisten Fällen nicht mehr heilbar…
1. Rückblick auf die Arbeitsergebnisse des ersten Bandes
Das erste Kapitel soll einen Einblick geben welche Hardware, Software aus Band I übernommen wurde. Die wichtigsten Details des Roboters, der Platinen und Software werden noch einmal kurz wiederholt.
Folgende Lernziele sind Bestandteil dieses Kapitels:
Informationen zur verwendeten Roboterhardware.
Programmierhardware.
Verwendete Software zum Laden und Programmieren des Roboters.
1.1 Informationen zur verwendeten Roboterhardware
Im Band I wurde ein Roboter vorgestellt, der vollkommen im Selbstbau erstellt werden kann. Der nun folgende Abschnitt zeigt die wichtigsten Bauabschnitte und die dazugehörigen Baupläne. Sollte das zu kompliziert für Sie sein, alle z.B. Chassisteile aus 3mm Sperrholz oder PCV zu fertigen, dann können sie den kompletten Bausatz, inklusive Software bei Schneider-Engineerings bestellen. Siehe Weblink www.ps-robotics.de. In dem Roboterbausatz sind allerdings nicht die im weiteren verwendeten Programmier- und Testplatinen enthalten. Diese können allerdings separat bezogen werden.
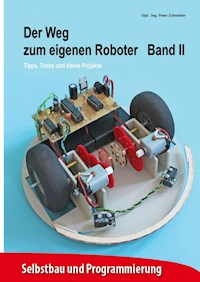
Den prinzipiellen Aufbau der Roboters zeigt die Abbildung 1. Das Chassis besteht aus einer runden Holzplatte oder PVC in dem die Ausschnitte für die Räder eingelassen sind. Die Abbildungen 2 bis 6 zeigen die einzelnen Zeichnungen mit Maßangaben für die Bauteile der beiden Getriebe. Das Getriebe wird aus insgesamt drei Teilen zusammengesetzt und anschließend Messingrohre als Lagerung für die Achsen eingeführt. Die Messingrohre haben die Längen 26mm, 24mm und 22mm. Als Achsen können z.B. 3mm Gewindestange genutzt werden. Bitte beachten Sie, dass das Getriebe einmal für links und einmal für rechts aufgebaut werden muss. Das fertige Getriebe zeigen die Abbildung 7 bis 9. Alle zum Roboternachbau benötigten Materialien sind im Anhang dieses Buches aufgeführt.
1.1.1 Chassis Roboter R2PT3
Abb.: 1
Grundplatte des Roboters
Abb.: 2
Einzelteile des Getriebechassis:
Abb.: 3
Abb.: 4
Zusammenführen der einzelnen Getriebeteile
Abb.: 5
Halterung für Ladebuchse, Ausschalter und Resetknopf
Abb.: 6
Das fertige Chassis sieht nach Zusammenbau folgendermaßen aus:
Chassis mit Motorverkabelung
Abb.: 7
Chassis komplett inkl. Steuerplatine
Abb.: 8
Detailaufnahme des Getriebes
Abb.: 9
Stoßstange des R2PT3
Abb.: 10
1.1.2 Steuerplatine des Roboters
Für den Bau der Steuerplatine wurde eine handelsübliche Lochstreifenplatine mit den Maßen 90mm × 50mm verwendet. Mit einem 4mm Bohrer wurden die Leiterbahnen je nach Bedarf aufgetrennt. Die Abbildungen 11, 13, 12 und 14 zeigen den überarbeiteten Schaltplan, Bohrplan, Legende (Zeichenerklärung) und Bestückungsplan der Steuerplatine. Änderungen, siehe
Schaltplan
Abb.: 11
Zeichenerklärung zu den Platinenlayouts
Abb.: 12
Bohrplan der Steuerplatine
Abb: 13
Bestückungsplan der Steuerplatine
Abb.: 14
Die Abbildung 15 zeigt wie die einzelnen Komponenten miteinander verbunden werden. als Energieversorgung nutzen wir 6 × 1,2Volt 1100mAh Akkus vom Type AAA.
Somit liegen Ihnen alle Informationen vor, die Sie zum Nachbau des Roboters benötigen. Als nächstes folgt ein kurzer Rückblick in die Programmierung des Roboters.
Abb.: 15
1.1.3 Die Test- und Programmierplatine
Schaltplan der Test- und Programmierplatine
Abb.: 16
Die Programmierhardware wird benötigt, um den Bootloader „einmalig“ auf den Mikrocontroller zu laden. Der Ladevorgang erfolgt mit dem Tool PonyProg2000 über ein spezielles Kabel, dass die RS232 des PCs mit der ISP Schnittstelle des Mikrocontrollers verbindet. Als Alternative stehen Ihnen für die Programmierung, als auch für das Aufspielen des Bootloaders, die von Atmel angebotenen, professionellen Programmierplatinen vom Type z.B. STK500 oder STK600 zur Verfügung. Die späteren Ladevorgänge der Software auf den Roboter erfolgen mit dem Programm Megaload. Die Software Megaload ist auf dem PC und lädt das zuvor kompilierte Programm mittels Bootloader in den Mikrocontroller. Als Compiler steht uns WinAVR zur Verfügung. Zur Programmentwicklung reicht ein einfacher Editor wie Notepad von Windows aus. Das C-Programm wird im Editor (z.B. Notepad) entwickelt, mit WinAVR kompiliert und anschließend mit Megaload auf den Mikrocontroller geladen.
Es gibt hier noch viel mehr zu erklären, aber das finden Sie ja alles in Band I erschöpfend erklärt.
Das war es nun mit dem Rückblick auf den Band I und Sie sollten nun einen Überblick über die genutzte Software und Hardware haben. Somit können wir uns nun ganz und gar auf den Inhalt des eigentlichen Band II konzentrieren. Anfangen wollen wir mit dem Analog-Digital-Wandler des ATmega8.
2. Auswerten von Sensorsignalen
Folgende Lernziele sind Bestandteil dieses Kapitels:
Flussdiagramme, auch Programmablaufpläne genannt
Signalauswertung über Polling
Signalauswertung über Interrupt
2.1 Flussdiagramme, auch Programmablaufpläne genannt
Mit einem Programmablaufplan werden die Auflistung der Programmabschnitte visualisiert und Verbindungen der einzelnen Funktionen aufgezeigt. Einen Programmablaufplan kann man beliebig detailliert gestalten. Ich habe mir folgende Vorgehensweise für das weitere Vorgehen überlegt in Bezug auf die Programmierung des Roboters. Bei komplexeren Funktionen möchte ich Ihnen die Abläufe bei der Programmabarbeitung mittels Flussdiagramm näher bringen. Die in Abbildung 17 gezeigte Visualisierung von Funktionen, Entscheidungen und Anweisungen müssen nicht zwangsläufig einer ISO Norm entsprechen und sind zum Teil auf meine Zwecke angepasst worden. Ganz wichtig, der Eine oder andere Leser wird sich jetzt sicher denken, was das doch für eine veraltete Darstellungsweise von Programmablaufplänen ist. Heute benutzt man schließlich XML. Gut, aber ich bin auch nicht mehr der Frischeste und für unsere Zwecke reicht ein Flussdiagramm völlig aus.









